В этой статье мы подробно рассмотрим, как работает H-мост, который применяется для управления двигателями постоянного тока с низким напряжением питания. В качестве примера мы будем использовать популярную среди любителей робототехники интегральную микросхему L298. Но сначала от простого к сложному.
H-мост на механических переключателях
Направление вращения вала у двигателя постоянного тока зависит от полярности питания. Чтобы изменить эту полярность, без переподключения источника питания, мы можем использовать 4 переключателя, как показано на следующем рисунке.

Этот тип соединения известен как «H Bridge» (H мост) — по форме схемы, которая похожа на букву «H». Эта схема подключения двигателя имеет очень интересные свойства, которые мы опишем в этой статье.
Если мы замкнем верхний левый и нижний правый переключатели, то двигатель будет подключен справа на минус, а слева на плюс. В результате этого он будет вращаться в одном направлении (путь прохождения тока указан красными линиями и стрелками).

Если же мы замкнем верхний правый и нижний левый переключатели, то двигатель будет подключен справа на плюс, а слева на минус. В таком случае двигатель будет вращаться в противоположном направлении.

Эта схема управления имеет один существенный недостаток: если оба переключателя слева или оба переключателя справа замкнуть одновременно, то произойдет короткое замыкание источника питания, поэтому необходимо избегать такой ситуации.

Интересным состоянием следующей схемы является то, что используя только два верхних или нижних переключателя, мы отключаем двигатель от питания, в результате чего двигатель останавливается.

Конечно, H-мост, выполненный исключительно только на переключателях, не очень универсален. Мы привели этот пример только для того, чтобы простым и наглядным образом объяснить принцип работы H-моста.
Но если мы заменим механические переключатели электронными ключами, то конструкция будет более интересна, поскольку в этом случае электронные ключи могут быть активированы логическими схемами, например, микроконтроллером.
H-мост на транзисторах
Для создания электронного H-моста на транзисторах можно использовать транзисторы как NPN, так и PNP типа. Могут быть использованы также и полевые транзисторы. Мы рассмотрим версию с NPN-транзисторами, потому что это решение использовано в микросхеме L298, которую мы увидим позже.

Транзистор — это электронный компонент, описание работы которого может быть сложным, но применительно к нашему H-мосту его работу легко проанализировать, поскольку он работает только в двух состояниях (отсечка и насыщение).
Транзистор мы можем представить просто как электронный переключатель, который закрыт, когда на базе (b) 0 В и открыт, когда на базе положительное напряжение.

Хорошо, мы заменили механические переключатели транзисторными ключами. Теперь нам необходим блок управления, который будет управлять нашими четырьмя транзисторами. Для этого мы будем использовать логические элементы типа «И».
Логика управления H-мостом
Логический элемент «И» состоит из интегрированных электронных компонентов и, не зная, что у него внутри, мы можем рассматривать его как своего рода «черный ящик», который имеет два входа и один выход. Таблица истинности показывает нам 4 возможные комбинации сигналов на входах и соответствующий им сигнал на выходе.
Мы видим, что только тогда, когда на обоих входах положительный сигнал (логическая единица), на выходе появляется логическая единица. Во всех остальных случаях на выходе будет логический ноль (0В).

В дополнение к данному логическому «И» элементу для нашего H-моста понадобиться другой тип логического элемента «И», у которого мы можем видеть небольшой круг на одном из его входов. Это все тот же логический элемент «И», но с одним инвертирующим (перевернутым) входом. В этом случае таблица истинности будет немного иная.

Если мы объединим эти два типа «И» элемента, с двумя электронными переключателями, как показано на следующем рисунке, то состояние выхода «Х» может быть в трех вариантах: разомкнутое, положительное или отрицательное. Это будет зависеть от логического состояния двух входов. Этот тип выхода известен как «выход с тремя состояниями» (Three-State Output) который широко используется в цифровой электронике.

Теперь посмотрим, как будет работать наш пример. Когда вход «ENA» (разрешение) равен 0В, независимо от состояния входа «А», выход «Х» будет разомкнут, поскольку выходы обоих «И» элементов будут равны 0В, и, следовательно, два переключателя также будут разомкнуты.
Когда мы подаем напряжение на вход ENA, один из двух переключателей будет замкнут в зависимости от сигнала на входе «A»: высокий уровень на входе «A» подключит выход «X» к плюсу, низкий уровень на входе «A» подключит выход «X» к минусу питания.
Таки образом, мы построили одну из двух ветвей «H» моста. Теперь перейдем к рассмотрению работы полного моста.
Эксплуатация полного H-моста
Добавив идентичную схему для второй ветви H-моста, мы получим полный мост, к которому уже можно подключить двигатель.
Обратите внимание, что вход разрешения (ENA) подключен к обеим ветвям моста, в то время как другие два входа (In1 и In2) независимы. Для наглядности схемы мы не указали защитные сопротивления на базах транзисторов.

Когда на ENA 0В, то на всех выходах логических элементов также 0В, и поэтому транзисторы закрыты, и двигатель не вращается. Если на вход ENA подать положительный сигнал, а на входах IN1 и IN2 будет 0В, то элементы «B» и «D» будут активированы. В этом состоянии оба входа двигателя будут заземлены, и двигатель также не будет вращаться.

Если мы подадим на IN1 положительный сигнал, при этом на IN2 будет 0В, то логический элемент «А» активируется вместе с элементом «D», а «B» и «C» будут отключены. В результате этого двигатель получит плюс питания от транзистора, подключенного к элементу «А» и минус от транзистора, подключенного к элементу «D». Двигатель начнет вращается в одном направлении.

Если же мы сигналы на входах IN1 и IN2 инвертируем (перевернем), то в этом случае логические элементы «C» и «B» активируются, а «A» и «D» будут отключены. Результат этого — двигатель получит плюс питания от транзистора, подключенного к «C» и минус от транзистора, подключенного к «B». Двигатель начнет вращаться в противоположном направлении.

Если на входах IN1 и IN2 будет положительный сигнал, то активными элементами с соответствующими транзисторами будут «A» и «C», при этом оба вывода мотора будут подключены к плюсу питания.

H-мост на драйвере L298
Теперь давайте посмотрим на работу микросхемы L298. На рисунке приведена структурная схема драйвера L298, который имеет два одинаковых H-моста и позволяет управлять двумя двигателями постоянного тока (DC).

Как мы можем видеть, отрицательная часть мостов напрямую не связана с землей, но доступна на выводе 1 для моста слева и на выводе 15 для моста справа. Добавив очень малое сопротивление (шунт) между этими контактами и землей (RSA и RSB), мы можем измерить ток потребления каждого моста с помощью электронной схемы, которая может измеряет падение напряжения в точках «SENS A» и «SENS B».
Это может быть полезно для регулирования тока двигателя (с использованием ШИМ) или просто для активации системы защиты, в случае если двигатель застопориться (в этом случае его ток потребления значительно возрастает).
Защитный диод для индуктивной нагрузки
Каждый двигатель содержит проволочную обмотку (катушку) и, следовательно, в процессе управления двигателем на его выводах возникает всплеск ЭДС самоиндукции, которая может повредить транзисторы моста.

Чтобы решить эту проблему, вы можете использовать быстрые диоды типа Shottky или, если наши двигатели не являются особо мощными, просто обычные выпрямительные диоды, например 1N4007. Нужно иметь в виду, что выходы моста в процессе управления двигателем меняют свою полярность, поэтому необходимо использовать четыре диода вместо одного.
Сегодня мы рассмотрим схему, позволяющую изменять полярность прикладываемого к нагрузке постоянного напряжения.
Необходимость изменять полярность напряжения часто возникает при управлении двигателями или в схемах мостовых преобразователей напряжения. Например, для двигателей постоянного тока это необходимо для изменения направления вращения, а шаговые двигатели или импульсные мостовые DC-DC преобразователи без решения этой задачи вообще не будут работать.
Итак, ниже вы можете видеть схему, которую за внешнюю схожесть с буквой H принято называть H-мостом.
К1, К2, К3, К4 — управляемые ключи
A, B, C, D — сигналы управления ключами
Идея этой схемы очень проста:
Если ключи K1 и К4 замкнуты, а ключи К2 и К3 разомкнуты, то к точке h1 оказывается приложено напряжение питания, а точка h2 замыкается на общий провод. Ток через нагрузку в этом случае течёт от точки h1 к точке h2.
Если сделать наоборот, — ключи К1 и К4 разомкнуть, а ключи К2 и К3 замкнуть, то полярность напряжения на нагрузке изменится на противоположную, — точка h1 окажется замкнута на общий провод, а точка h2 — на шину питания. Ток через нагрузку теперь будет течь от точки h2 к точке h1.
Кроме смены полярности, h-мост, в случае управления электродвигателем, добавляет нам и ещё один бонус — возможность закоротить концы обмоток, что ведёт к резкому торможению нашего движка. Такой эффект можно получить замкнув одновременно либо ключи К1 и К3, либо ключи К2 и К4. Назовём такой случай «режимом торможения». Справедливости ради стоит отметить, что этот бонус H-моста используется значительно реже, чем просто смена полярности (позже будет понятно почему).
В качестве ключей может выступать всё, что угодно: реле, полевые транзисторы, биполярные транзисторы. Промышленность делает H-мосты встроенными в микросхемы (например, микросхема LB1838, драйвер шагового двигателя, содержит два встроенных H-моста) и выпускает специальные драйверы для управления H-мостами (например драйвер IR2110 для управления полевиками). В этом случае, разработчики микросхем конечно стараются выжать максимум бонусов и устранить максимум нежелательных эффектов. Понятно, что такие промышленные решения справляются с задачей лучше всего, но радиохламеры народ бедный, а хорошие микросхемы стоят денег, поэтому мы, ясен пень, будем рассматривать чисто самопальные варианты мостов и схем управления ими.
В самопальщине (то бишь в радиолюбительской практике) чаще всего используют H-мосты либо на мощных MOSFET-ах (для больших токов), либо на биполярных транзисторах (для небольших токов).
Довольно часто сигналы управления ключами попарно объединяют. Объединяют их таким образом, чтобы от одного внешнего сигнала управления формировалось сразу два сигнала управления в нашей схеме (то есть сразу на два ключа). Это позволяет сократить количество внешних сигналов управления с четырёх до двух штук (и сэкономить 2 ноги контроллера, если у нас контроллерное управление).
Объединяют сигналы чаще всего двумя способами: либо A объединяют с B, а C объединяют с D, либо A объединяют с D, а B объединяют с C. Чтобы обозначить и зафиксировать различия, — назовём способ, когда образуют пары AB и CD «общим управлением противофазными ключами» (эти ключи для изменении полярности прикладываемого к нагрузке напряжения должны работать в противофазе, т.е. если один открывается — другой должен закрываться), а способ, когда образуются пары AD и BC назовём «общим управлением синфазными ключами» (эти ключи для изменении полярности работают синфазно, т.е. либо оба должны открываться, либо оба закрываться).

Чтобы было понятнее о чём идёт речь, — смотрим на рисунок справа. Договоримся далее высокий уровень напряжения считать единицей, а низкий — нулём. В левой части рисунка транзисторы управляются независимо друг от друга. Чтобы открыть верхний транзистор — нужно подать сигнал управления А=0, а чтобы его закрыть — нужно подать А=1. Для открытия и закрытия нижнего транзистора нужно подавать B=1 или В=0. Если с помощью дополнительного транзистора объединить сигналы A и В (смотрим правую часть рисунка), то управлять верхним и нижним транзистором можно одним общим сигналом АВ. Когда АВ=1 оба транзистора открываются, а когда АВ=0 — оба закрываются.


На рисунке слева показан H-мост с общим управлением противофазными ключами, а на рисунке справа — с общим управлением синфазными ключами. У1 и У2 — это узлы, позволяющие из одного внешнего общего сигнала сформировать отдельный сигнал на каждый из работающих в паре ключей.
Теперь давайте подумаем что нам даёт каждый из этих двух способов управления.
При общем управлении противофазными ключами мы легко можем сделать так, чтобы оба верхних или оба нижних ключа оказались открыты (если схема такая, как у нас слева, то это произойдёт при AB=CD), то есть нам доступен режим торможения. Однако минус в том, что при таком способе управления мы практически наверняка получим сквозные токи через транзисторы, вопрос будет только в их величине. В проиышленных микрухах для борьбы с этой проблемой вводят специальную цепь задержки для одного из транзисторов.
При общем управлении синфазными ключами мы легко можем побороть сквозные токи (просто нужно сначала подавать сигнал на выключение той пары транзисторов, которая используется в настоящий момент, а уже потом сигнал на включение той пары, которую мы планируем использовать). Однако при таком управлении про режим торможения можно забыть (даже более того, если мы случайно одновременно подадим на оба внешних управляющих сигнала единицу — мы устроим в схеме КЗ).
Поскольку получить сквозные токи гораздо более кислый вариант (бороться с ними непросто), то обычно предпочитают забыть про режим торможения.
Кроме всего вышеперечисленного необходимо понимать, что при частых постоянных переключениях (в преобразователях или при управлении шаговиками), для нас будет принципиально важно не только избежать возникновения сквозных токов, но и добиться максимальной скорости переключения ключей, поскольку от этого зависит их нагрев. Если же мы используем h-мост просто для реверса двигателя постоянного тока, то тут скорость переключения не имеет такого критического значения, поскольку переключения не имеют систематического характера и ключи даже в случае нагрева скорее всего успеют остыть до следующего переключения.
Вот в общем-то и вся теория, если вспомню ещё что-нибудь важное — обязательно напишу.
Как вы понимаете, практических схем H-мостов, как и вариантов управления ими, можно придумать достаточно много, поскольку, как мы уже разобрались, важно учитывать и максимальный ток, и скорость переключения ключей, и варианты объединения управления ключами (а также вообще возможность такого объединения), поэтому для каждой практической схемы нужна отдельная статья (с указанием того, где эту конкретную схему целесообразно использовать). Здесь же я приведу для примера лишь простую схемку на биполярных транзисторах, годящуюся, скажем, для управления не очень мощными двигателями постоянного тока (зато покажу, как её рассчитывать).
Итак, пример:

Сам H-мост выполнен на транзисторах T1, T2, T3, T4, а с помощью дополнительных транзисторов T5, T6 выполнено объединение управления синфазными ключами (сигнал A управляет транзисторами T1 и T4, сигнал B — транзисторами T2 и T3).
Работает эта схема следующим образом:
Когда уровень сигнала A становится высоким — начинает течь ток через резистор R2 и p-n переходы БЭ транзисторов T5 и T4, эти транзисторы открываются, в результате чего появляется ток через переход БЭ транзистора T1, резистор R1 и открытый транзистор T5, в результате чего открывается транзистор T1.
Когда уровень сигнала A становится низким — запираются p-n переходы БЭ транзисторов T5 и T4, эти транзисторы закрываются, прекращает течь ток через переход БЭ транзистора T1 и он тоже закрывается.
Как такую схему рассчитать? Очень просто. Пусть у нас напряжение питания 12В, максимальный ток двигателя 1А и сигнал управления также 12-ти вольтовый (состоянию «1» соответствует уровень напряжения около 12В, состоянию «0» — уровень около нуля вольт).
Сначала выбираем транзисторы T1, T2, T3, T4. Подойдут любые транзисторы, способные выдержать напряжение 12В и ток 1А, например, КТ815 (npn) и его комплиментарная пара — КТ814 (pnp). Эти транзисторы рассчитаны на ток до 1,5 Ампер, напряжение до 25 Вольт и имеют коэффициент усиления 40.
Рассчитываем минимальный ток управления транзисторов T1, T4: 1А/40=25 мА.
Рассчитываем резистор R1, полагая, что на p-n переходах БЭ транзисторов T1, T4 и на открытом транзисторе T5 падает по 0,5В: (12-3*0,5)/25=420 Ом. Это максимальное сопротивление, при котором мы получим нужный ток управления, поэтому мы выберем ближайшее меньшее значение из стандартного ряда: 390 Ом. При этом наш ток управления будет (12-3*0,5)/390=27 мА, а рассеиваемая на резисторе мощность: U 2 /R=283 мВт. То есть резистор надо ставить на 0,5 Вт (ну или поставить несколько 0,125 ваттных параллельно, но чтоб их общее сопротивление получилось 390 Ом)
Транзистор T5 должен выдерживать всё те же 12В и ток 27 мА. Подойдёт, например, КТ315А (25 Вольт, 100 мА, минимальный коэффициент усиления 30).
Рассчитываем его ток управления: 27 мА / 30 = 0,9 мА.
Рассчитываем резистор R2, полагая, что на переходах БЭ транзисторов T5 и T4 падает по 0,5 В: (12-2*0,5)/0,9 = 12 кОм. Опять выбираем ближайшее меньшее значение из стандартного ряда: 10 кОм. При этом ток управления T5 будет 1,1 мА и на нём будет рассеиваться 12,1 мВт тепла (то есть подойдёт обычный резистор на 0,125 Вт).
Вот и весь расчёт.
Далее хотелось бы поговорить вот о чём. В приведённых в статье теоретических схемах H-мостов у нас нарисованы только ключи, однако в рассматриваемом примере, кроме ключей присутствуют ещё одни элементы — диоды. Каждый наш ключ шунтирован диодом. Зачем это сделано и можно ли сделать как-то иначе?
В нашем примере мы управляем элетродвигателем. Нагрузкой, на которой мы переключаем полярность с помощью H-моста, является обмотка этого двигателя, то есть нагрузка у нас индуктивная. А у индуктивности есть одна интересная особенность — ток через неё не может измениться скачком.
Индуктивность работате как маховик — когда мы его раскручиваем — он запасает энергию (и мешает раскручиванию), а когда мы его отпускаем — он продолжает крутиться (расходуя
запасённую энергию). Так и катушка, — когда к ней прикладывают внешнее напряжение — через неё начинает течь ток, но он не резко вырастает, как через резистор, а постепенно, поскольку часть передаваемой источником питания энергии не расходуется на разгон электронов, а запасается катушкой в магнитном поле. Когда мы это внешнее напряжение убираем, — ток через катушку тоже не спадает мгновенно, а продолжает течь, уменьшаясь постепенно, только теперь уже на поддержание этого тока расходуется запасённая ранее в магнитном поле энергия.
Так вот. Посмотрим ещё раз наш самый первый рисунок (вот он, справа). Допустим у нас были замкнуты ключи К1 и К4. Когда мы эти ключи размыкаем, у нас через обмотку продолжает течь ток, то есть заряды продолжают перемещаться от точки h1 к точке h2 (за счёт энергии, накопленной обмоткой в магнитном поле). В результате этого перемещения зарядов, потенциал точки h1 падает, а потенциал точки h2 вырастает. Возникновение разности потенциалов между точками h1 и h2 при отключении катушки от внешнего источника питания известно также как ЭДС самоиндукции. За то время, пока мы открываем ключи K3 и К2, потенциал точки h1 может упасть значительно ниже нуля, также как и потенциал точки h2 может вырасти значительно выше потенциала шины питания. То есть наши ключи могут оказаться под угрозой пробоя высоким напряжением.
Как с этим бороться? Есть два пути.
Первый путь. Можно зашунтировать ключи диодами, как в нашем примере. Тогда при падении потенциала точки h1 ниже уровня общего провода откроется диод D3, через который с общего провода в точку h1 потечёт ток, и дальнейшее падение потенциала этой точки прекратиться. Аналогично, при росте потенциала точки h2 выше потенциала шины питания откроется диод D2, через который потечёт ток из точки h2 на шину питания, что опять же предотвратит дальнейший рост потенциала точки h2.
Второй путь основан на том факте, что при перекачивании зарядов из одной точки схемы в другую, изменение потенциалов между этими двумя точками будет зависеть от ёмкости схемы между этими точками. Чем больше ёмкость — тем больший заряд нужно переместить из одной точки в другую для получения одной и той же разности потенциалов (подробнее читайте в статье «Как работают конденсаторы»). Исходя из этого можно ограничить рост разности потенциалов между концами обмотки двигателя (а, соответственно, и рост разности потенциалов между точками h1, h2 и шинами питания и земли), зашунтировав эту обмотку конденсатором. Это, собственно, и есть второй путь.
На этом на сегодня всё, удачи!
Электронные трансформаторы приходят на смену громоздким трансформаторам со стальным сердечником. Сам по себе электронный трансформатор, в отличие от классического, представляет собой целое устройство - преобразователь напряжения.

Применяются такие преобразователи в освещении для питания галогенных ламп на 12 вольт. Если вы ремонтировали люстры с пультом управления , то, наверняка, встречались с ними.
Вот схема электронного трансформатора JINDEL (модель GET-03 ) с защитой от короткого замыкания.
![]()

Основными силовыми элементами схемы являются n-p-n транзисторы MJE13009 , которые включены по схеме полумост. Они работают в противофазе на частоте 30 - 35 кГц. Через них прокачивается вся мощность, подаваемая в нагрузку - галогенные лампы EL1...EL5. Диоды VD7 и VD8 необходимы для защиты транзисторов V1 и V2 от обратного напряжения. Симметричный динистор (он же диак) необходим для запуска схемы.
На транзисторе V3 (2N5551 ) и элементах VD6, C9, R9 - R11 реализована схема защиты от короткого замыкания на выходе (short circuit protection ).
Если в выходной цепи произойдёт короткое замыкание, то возросший ток, протекающий через резистор R8, приведёт к срабатыванию транзистора V3. Транзистор откроется и заблокирует работу динистора DB3, который запускает схему.
Резистор R11 и электролитический конденсатор С9 предотвращают ложное срабатывание защиты при включении ламп. В момент включения ламп нити холодные, поэтому преобразователь выдаёт в начале пуска значительный ток.
Для выпрямления сетевого напряжения 220V используется классическая мостовая схема из 1,5-амперных диодов 1N5399 .
В качестве понижающего трансформатора используется катушка индуктивности L2. Она занимает почти половину пространства на печатной плате преобразователя.
В силу своего внутреннего устройства, электронный трансформатор не рекомендуется включать без нагрузки. Поэтому, минимальная мощность подключаемой нагрузки составляет 35 - 40 ватт. На корпусе изделия обычно указывается диапазон рабочих мощностей. Например, на корпусе электронного трансформатора, что на первой фотографии указан диапазон выходной мощности: 35 - 120 ватт. Минимальная мощность нагрузки его составляет 35 ватт.
Галогенные лампы EL1...EL5 (нагрузку) лучше подключать к электронному трансформатору проводами не длиннее 3 метров. Так как через соединительные проводники протекает значительный ток, то длинные провода увеличивают общее сопротивление в цепи. Поэтому лампы, расположенные дальше будут светить тусклее, чем те, которые расположены ближе.
Также стоит учитывать и то, что сопротивление длинных проводов способствует их нагреву из-за прохождения значительного тока.
Стоит также отметить, что из-за своей простоты электронные трансформаторы являются источниками высокочастотных помех в сети. Обычно, на входе таких устройств ставится фильтр , который блокирует помехи. Как видим по схеме, в электронных трансформаторах для галогенных ламп нет таких фильтров. А вот в компьютерных блоках питания, которые собираются также по схеме полумоста и с более сложным задающим генератором, такой фильтр, как правило, монтируется.
Двигатели есть практически в каждом роботе. В одних роботах они приводят в действие колеса, заставляя машину перемещаться в нужном направлении. В других — двигатели крутят пропеллеры, создавая вертикальную тягу для полета. Двигатели позволяют вращаться суставам промышленного робота-манипулятора, и перемещают каретку 3D-принтера. В общем, без хорошего двигателя робота не сделать. Существует множество типов двигателей. К самым распространенным в робототехнике можно отнести двигатель постоянного тока, шаговый двигатель, и бесколлекторный двигатель. У каждого типа есть свои особенности, плюсы и минусы. Одни больше подходят для точных перемещений, другие позволяют легко поднять в небо мультикоптер. Под каждый проект нужно тщательно выбирать нужный тип двигателей. На этом уроке мы разберем, как управлять двигателем постоянного тока (DC Motor). Двигатели этого типа части применяются в роботах на колесных и гусеничных платформах. И начнем мы с самого простого способа управления.
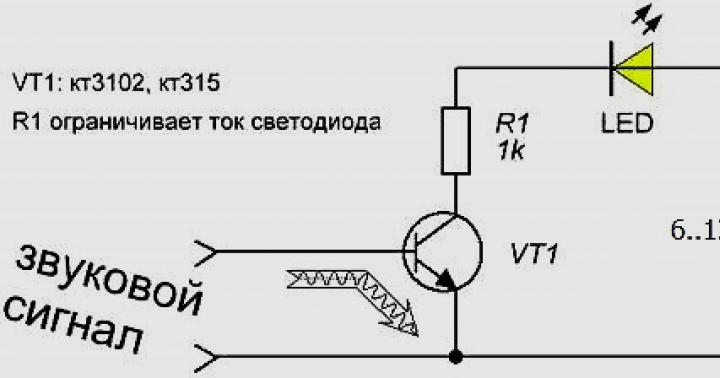
1. Транзистор
Каждый начинающий робототехник сталкивается с проблемой подключения двигателя к микроконтроллеру. Пройдя кажется, что с двигателем можно поступить точно также: подключить его к цифровым выводам Ардуино , а затем включать и выключать по программе. Но не тут-то было. Даже небольшой двигатель, часто используемый в разного рода игрушках, для своей работы требует ток силой от 200 мА до 1 Ампера. А цифровой выход Arduino может дать нам только 20мА. Большинству мощных двигателей требуется напряжение более 5 Вольт, привычных для Ардуино. Распространены двигатели на 12, на 24 и на 48 Вольт. Другими словами, Ардуино очень слаба для прямого управления двигателями. Нужен какой-то мощный посредник! Самый простой посредник — это транзистор. Подойдут и полевые транзисторы, и биполярные, работающие в режиме ключа. Ниже представлена схема управления двигателем при помощи биполярного NPN транзистора.2. H-мост
Составив транзисторы определенным образом, мы получим устройство для управления вращением двигателя в обе стороны. Такое устройство называется H-мост . Вот так выглядит H-мост на биполярных транзисторах: INA и INB на рисунке — это вход слабых управляющих сигналов. В случае Ардуино, на них необходимо подавать либо 0 (земля) либо +5В. VCC — это питание двигателей, оно может быть во много раз выше напряжения управляющего сигнала. GND — это земля, общая для Ардуино и H-моста.
В зависимости от того, на какой из входов мы подаем положительный сигнал, двигатель будет крутиться в одну или в другу сторону. Как правило, в схему драйвера двигателя постоянного тока помимо самого H-моста, добавляют защитные диоды, фильтры, опторазвязки и прочие улучшения.
INA и INB на рисунке — это вход слабых управляющих сигналов. В случае Ардуино, на них необходимо подавать либо 0 (земля) либо +5В. VCC — это питание двигателей, оно может быть во много раз выше напряжения управляющего сигнала. GND — это земля, общая для Ардуино и H-моста.
В зависимости от того, на какой из входов мы подаем положительный сигнал, двигатель будет крутиться в одну или в другу сторону. Как правило, в схему драйвера двигателя постоянного тока помимо самого H-моста, добавляют защитные диоды, фильтры, опторазвязки и прочие улучшения.
3. Микросхема драйвера L293D
Разумеется, необязательно собирать драйвер двигателя вручную из отдельных транзисторов. Существует множество готовых микросхем, которые позволяют управлять разными типами двигателей. Мы рассмотри распространенный драйвер L293D . Микросхема представляет собой два H-моста, а значит можно управлять сразу двумя двигателями. Каждый мост снабжен четырьмя защитными диодами и защитой от перегрева. Максимальный ток, который может передать L293D на двигатель — 1.2А. Рабочий ток — 600мА. Максимальное напряжение — 36 В.
Микросхема представляет собой два H-моста, а значит можно управлять сразу двумя двигателями. Каждый мост снабжен четырьмя защитными диодами и защитой от перегрева. Максимальный ток, который может передать L293D на двигатель — 1.2А. Рабочий ток — 600мА. Максимальное напряжение — 36 В.
4. Подключение
Микросхема L293D имеет DIP корпус с 16-ю выводами. Схема выводов ниже. Помним, что отсчет выводов ведется против часовой стрелки и начинается от выемки в корпусе микросхемы.
Помним, что отсчет выводов ведется против часовой стрелки и начинается от выемки в корпусе микросхемы.
- +V — питание микросхема, 5В;
- +Vmotor — питание двигателей, до 36В;
- 0V — земля;
- En1, En2 — выводы включения/выключения H-мостов;
- In1, In2 — управляющие выводы первого H-моста;
- Out1, Out2 — выводы для подключения первого двигателя;
- In3, In4 — управляющие выводы второго H-моста;
- Out3, Out4 — выводы для подключения второго двигателя.
| Драйвер L293D | In1 | In2 | In3 | In4 | En1 | En2 | V+ | Vmotor+ | 0V |
| Arduino Uno | 7 | 8 | 2 | 3 | 6 | 5 | +5V | +5V | GND |
 Внешний вид макета
Внешний вид макета

5. Программа
Напишем простую программу, которая будет вращать двигатель, меняя направление каждую секунду. const int in3 = 2; const int in4 = 3; const int en2 = 5; void setup() { pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); pinMode(en2, OUTPUT); analogWrite(en2, 255); } void loop() { digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(1000); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(1000); } Функция analogWrite с помощью ШИМ сигнала управляет мощностью двигателя. В этой программе мы командуем драйверу вращать двигатель с максимальной скоростью, что соответствует ШИМ сигналу — 255. Здесь следует отметить, что уменьшение ШИМ сигнала в два раза не даст в два раза меньшую скорость. Скорость и тяга двигателей постоянного тока зависят от входного напряжения нелинейно. Теперь усложним программу. Будем кроме направления менять еще и мощность. const int in3 = 2; const int in4 = 3; const int en2 = 5; void setup() { pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); pinMode(en2, OUTPUT); } void loop() { digitalWrite(in3, HIGH); digitalWrite(in4, LOW); analogWrite(en2, 150); delay(2000); analogWrite(en2, 255); delay(2000); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); analogWrite(en2, 150); delay(2000); analogWrite(en2, 255); delay(2000); } Вот что получится в итоге. Сначала мотор вращается с небольшой скоростью, затем выходит на максимальные обороты, и повторяет все в обратном направлении. На видео мы крутим распространенный двигатель постоянного тока CH1 с колесом. Такие часто применяют в учебных роботах.Задания
Теперь, когда стало немного понятнее как управлять обычными двигателями постоянного тока, попробуем выполнить несколько заданий на базе самого простого робота на двух колесах.- Собрать драйвер на основе одного NPN транзистора, и вращать с помощью него мотор.
- Управлять сразу двумя моторами при помощи L293D, передавая на них разную мощность.
- Собрать колесного робота, и заставить его двигаться по окружности.
- Заставить колесного робота двигаться по спирали.
Отличительные особенности:
- Выключение при перегреве
- Выключение при перегрузке по току
- Пусковой ток ограничен функцией плавного старта
- Защита от электростатического разряда
- Статусная обратная связь
- Режим сна для непосредственного подключения батареи
- Работа с торможением и без
- Краткая характеристика:
- Сопротивление включенного канала Rds(on) 12 мОм
- Рабочее напряжение питания V cc.op. 5.5…35В
- Продолжительный ток нагрузки I cont. (Ta = 85°C) 7.0A
- Порог срабатывания токовой защиты Ishutdown 30A
- Рабочая частота 20 кГц
Типовая схема включения:
Блок-схема:

Расположение выводов:

Описание выводов:
Описание:
IR3220 – интегральная схема сдвоенного ключа верхнего уровня. Вместе с двумя ключами нижнего уровня, например, IRF741), IR3220 организует управляемый Н-мост. Она обеспечивает защиту от потери управляемости каждого плеча, логику управления H-мостом, плавный запуск и защиты от перегрузок по току и напряжению. Сигналами IN1 и IN2 задаются рабочие режимы и активизируется последовательность циклов ШИМ для плавного запуска старта для ограничения пускового тока. При использовании указанного типа транзистора и надлежащем охлаждении, внутренняя система микросхемы, контролирующая ключи верхнего уровня, защищает работу всего –Н-моста. Продолжительность плавного запуска задается постоянной времени внешней RC-цепи и сбрасывает автоматически.
Документация: